출품자 : 진근우,최정호
지도교수 :
학교명 : 동아대
1. 발명의 목적
본 발명은 원거리에 위치한 시료의 채취를 목적으로 아두이노, 드론과 결합하여 추가적인 조작 없이 특정 조건 내에서 자동적인 시료채취 임무를 수행하는 채취기 제작에 관한 것입니다. 빠른 이동속도와 원격 제어가 가능한 드론에 다양한 스위치나 센서로부터 입력값을 받아들여 모터와 같은 장치들의 출력 제어, 자동화가 가능한 아두이노를 결합함으로써 다양한 현장에서 사람의 수고를 덜고, 시간과 비용에 있어서도 기존의 채취 작업과 비교했을 때 큰 장점을 가집니다. 예를 들어 토계 시료(백사장, 논, 뻘 등)를 채취할 때 사람이 접근할 필요 없이 쉽고 빠르게 시료를 채취할 수 있고, 수계 시료(강, 호수, 댐 등)를 때도 배에 탑승하여 접근할 필요 없이 목표하는 시료를 채취할 수 있습니다. 뿐만 아니라 광산과 그 처리시설의 경제성 평가, 지역별 오염도 평가 등 많은 산업현장에서도 본 발명은 활용될 수 있습니다.
2. 발명의 핵심내용
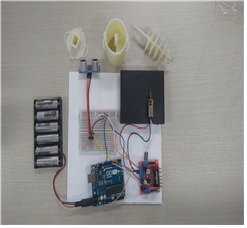
본 발명의 핵심내용은 크게 네 가지로서, 첫째는 ""아두이노 플랫폼""입니다. 앞서 소개한 아두이노는 다양한 스위치나 센서로부터 입력값을 받아들여 사용자가 구성한 다양한 알고리즘에 따라 모터 등의 출력을 제어할 수 있습니다. 뿐만 아니라 사용자의 전자기기와 연동하여 아두이노의 입력값들을 실시간으로 확인할 수도 있고, GPS를 비롯한 다른 모듈과 결합하여 추가적인 기능도 부여할 수 있습니다. 본 발명에서는 채취기와 채취 대상의 거리를 초음파 센서로 측정하고, 이에 따라 채취기의 가동을 제어합니다. 채취기 가동범위는 모터의 회전수와 회전 시간으로 제어가 가능한데, 본 발명은 사용하는 모터의 특징에 따라 시간을 변수로 제어합니다. 아두이노 플랫폼에 GPS 모듈을 장착하여 거리에 따른 자료의 신뢰성을 보정하는 것도 중요 내용이며, 이 모든 과정의 자동화와 사용자의 기기에 연동하여 실시간으로 확인이 가능한 것이 아두이노 플랫폼의 핵심내용입니다.


